Week 4 Update
The balloon payload team mainly spent week four finalizing the experiment designs. Mock-ups of the experimental enclosures were constructed to ensure an appropriately size payload, while most of the necessary parts have been ordered. In the meantime, background information has been compiled into a rough draft for the interim report coming up next week. The team also had the privilege to visit the RPC (Rapid Prototyping Center, one of the MSOE facilities), where a majority of our manufactured parts will be fabricated. It was really nice to meet the people responsible for our parts, and witnessing the technology firsthand definitely eliminated any skepticism as to whether or not our parts are feasible.
Sub-team Updates:
Charge/Voltage
- Created a mock-up for size. The breakdown voltage experiment will be housed in a protective enclosure because of the high voltages involved. Approximate size: 7" x 3" x 2.5".
- Modeled enclosure in SolidWorks. Parts will be sent to the RPC early next week.
- Studied the Basic Stamp. The static charge experiment will need this microcontroller to read and store a signal from the circuit at a specific rate. The voltage experiment will need it to control a Servo motor gear that will determine the gap distance using a gear rack.
Shown to the right is the most updated apparatus for measuring the breakdown voltage. The Servo will be controlled by the Basic Stamp to turn the gear, and determine the location of the gear rack. This gear rack will be effectively change the gap distance in the circuit (closest compartment). The further compartment will house the 500V source in attempt to isolate it from the rest of the experiments. | 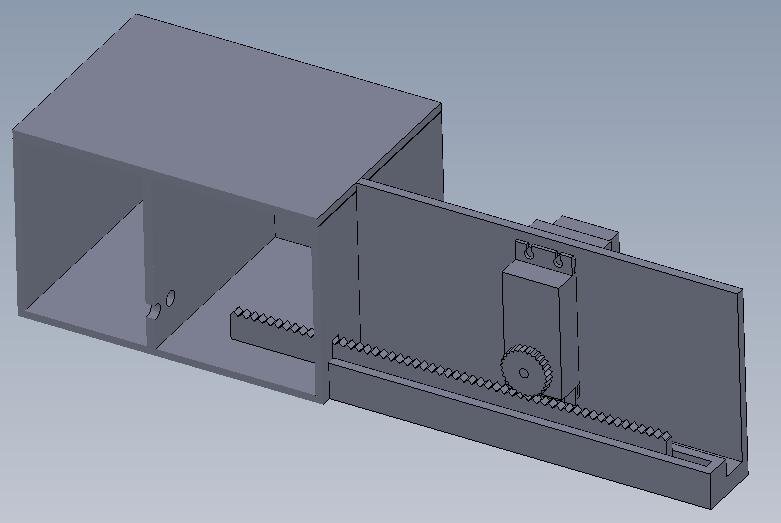 |
Solar Tracking
- Implemented a cross design for the
photodiodes. Four diodes are slanted outwards and surround the
centrally located main diode.
- Got the 2-way tracking system to follow sun outdoors. It became clear that shade walls will be needed because of the intensity of light from all directions.
- Thought about how to program the Basic Stamp to flip over and reset the system when the Servos reach their 180-degree limit.
- Ordered solar cells. A 6-pack from Parallax should do the trick.
- Found custom dome to cover tracking device. A security company custom makes the domes that are really meant to cover security cameras.
Mercury/Ozone
- Created a mock-up for size. Approximate size: 6" x 4" x 4"
- Finalized model in SolidWorks. The original design weighed 1.6 lbs, so the parts were modified to reduce weight. Fillets were added to maintain strength. Approximate weight (only RPC parts and traps): 1.09 lbs.
- Designed a vacuum adapter. A PRC part will slip over the vacuum nozzle with a ribbed nozzle screwed into the smaller side to fit the tubing.
- Delved into Basic Stamp programming. This microcontroller will be needed to control the position of the Servo gear, and after calibration, the position of the cylinder.
- Designed the intake nozzle. Both intake and
outflow will be directed downwards to eliminate environmental
contamination. A screen will prevent clogs.
Shown to the right is the latest SolidWorks model of the mercury testing contraption. The model is shown pulled apart to highlight the individual components. Air will enter the funnel on the right from the bottom of the payload, go through the cylinder housing the traps, and exit the funnel on the left, which will be attached to the vacuum. |  |
With a high level of confidence, I feel that all sub-teams are on track for a successful launch by the end of July. Thank you so much for this opportunity!
Tyler Van Fossen